
 掃描關(guān)注微信
掃描關(guān)注微信



3.2、確定模糊規(guī)則
模糊規(guī)則用來(lái)修正PID控制器的參數(shù),因此,模糊規(guī)則表的選取十分重要。模糊規(guī)則推理的輸入輸出都是模糊量,不同的模糊推理的出來(lái)的結(jié)果是不一樣的,而采用不同的模糊推理方法,語(yǔ)言變量的分檔也是不一樣的。模糊推理方法有Zadeh法、Mamdani法和Baldwin法等,本文采用Mamdani發(fā),也即MAX-MIN法來(lái)進(jìn)行模糊推理,其方法為:分別在不同規(guī)則中采用各自推理的前件的總隸屬度去切割本推理規(guī)則中后件的隸屬度函數(shù)以得到輸出結(jié)果,最后對(duì)所有的結(jié)論進(jìn)行模糊邏輯并運(yùn)算,得到總的推理結(jié)果,簡(jiǎn)單來(lái)說(shuō)就是:前件取極小值,后件取極大值。
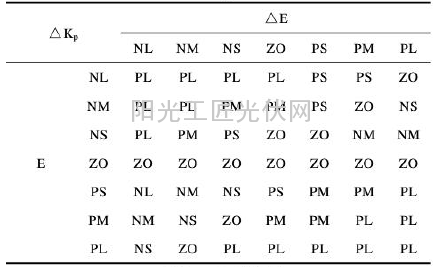
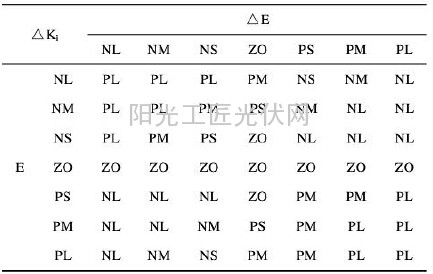
根據(jù)PID調(diào)節(jié)規(guī)律,結(jié)合實(shí)際光伏陣列的端電壓與輸出電流的關(guān)系情況,得到表1所示的調(diào)節(jié)規(guī)則表,其中表1(a)為|Kp|的模糊規(guī)則,表1(b)為|Ki|的模糊規(guī)則,這些規(guī)則都是用模糊語(yǔ)言量來(lái)表示的。
表1 模糊PI控制規(guī)則表
(a)|Kp|規(guī)則表
(b)|Ki|規(guī)則表
運(yùn)用MATLAB的模糊工具箱,畫(huà)出本文的模糊控制器的非線性關(guān)系曲面圖,其中圖5(a)是|Kp|與e、|e|的關(guān)系,圖5(b)是|Ki|與e、|e|的關(guān)系,普通PID調(diào)節(jié)器在xyz三維空間里是一張通過(guò)坐標(biāo)原點(diǎn)的平面,其具有線性調(diào)節(jié)規(guī)律,而模糊控制器在三維空間中是一張通過(guò)原點(diǎn)的分片二次曲面,整張曲面畢竟一個(gè)階數(shù)可以很高的非線性調(diào)節(jié)規(guī)律,故其整體控制效果要優(yōu)于普通的PID調(diào)節(jié)器,模糊控制器在控制過(guò)程中的前期階段具有模糊控制器的全部?jī)?yōu)點(diǎn),而在控制過(guò)程的后期階段又具有PID調(diào)節(jié)器的所有優(yōu)勢(shì),因此是一種性能良好的控制器。

3.3、反模糊化
經(jīng)過(guò)模糊推理后的結(jié)果是一些語(yǔ)言量的模糊結(jié)果,這種結(jié)果是無(wú)法對(duì)精確的模擬或數(shù)字系統(tǒng)進(jìn)行控制的,我們必須進(jìn)行反模糊化,通過(guò)精確化計(jì)算得出此模糊集中最有代表意義的確定值作為系統(tǒng)的控制輸出。反模糊化有很多種不同的方法,如重心法、最大隸屬度法、中位數(shù)法等,重心法不僅有公式可循,而且理論上比較合理,它涵蓋利用了模糊理論的所有信息,并根據(jù)隸屬度的不同而有所側(cè)重,因此本文選用重心法作為反模糊化的方法。



 寧德時(shí)代吳凱...
寧德時(shí)代吳凱... 天合光能陳奕...
天合光能陳奕... 劉巖: 追光行...
劉巖: 追光行... 黃震院士:大...
黃震院士:大...